Jet Loop
August 2025
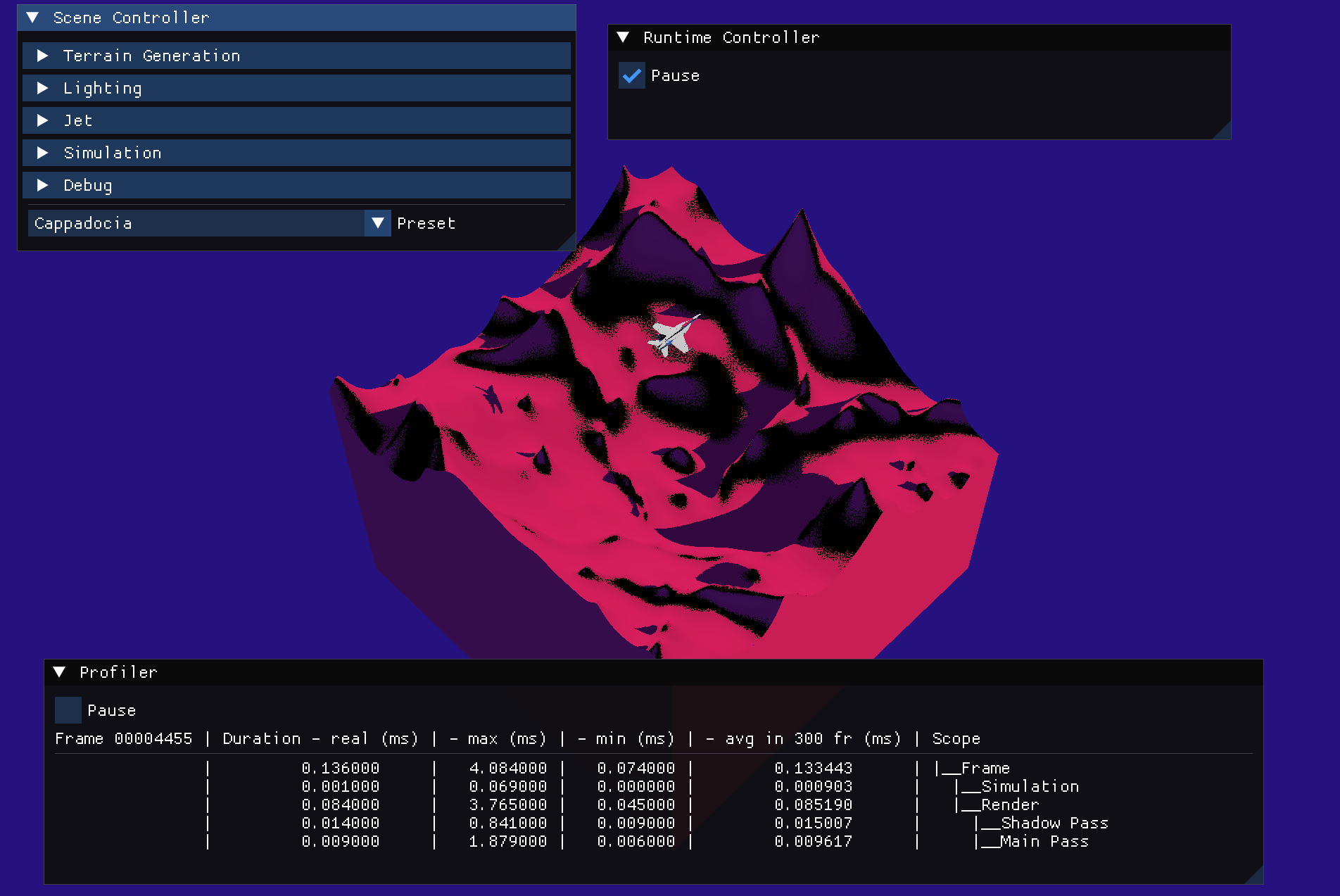
This is a small practice project, started for the purpose of learning OpenGL and the basics of engine-less rendering. The idea of an endless jet flight as well as the stylized visuals was inspired by the incredible work of Calder Moore. The project also features a scope-based profiler (single threaded). For the current state of the source code please visit this link.
For the profiler, timings are collected into a node tree and traversed with a custom iterator, then the current frame is streamed to an ImGui widget through an exposed interface. Snippets of the implementation are provided below.
Profiler header.
namespace Profiler
{
struct FrameProfileData
{
static const size_t headerSize = 128;
static const size_t bodySize = 1024;
char header[headerSize];
char body[bodySize];
};
class FrameDataVisualizer
{
public:
virtual void visualizeFrameData(const FrameProfileData& frameData) = 0;
};
class ScopeTimer
{
public:
static int sFrameNumber;
static bool sIsPaused;
ScopeTimer(int id, const char* name);
~ScopeTimer();
private:
int m_id;
const char* m_name;
std::chrono::time_point<std::chrono::steady_clock> m_startTimePoint;
};
void onStartFrame();
void onEndFrame(FrameDataVisualizer* pVisualizer);
void endProfiler();
}
#endif // PROFILER_H
#ifndef PROFILER_MACROS_DEFINED
#define PROFILER_MACROS_DEFINED
#if defined (PROFILE)
#define PROFILE_SCOPE(nameLiteral) Profiler::ScopeTimer timer(FILELINE_ID, nameLiteral)
#define PROFILER_START_FRAME() Profiler::onStartFrame()
#define PROFILER_END_FRAME(visualizer) Profiler::onEndFrame(visualizer)
#define PROFILER_END() Profiler::endProfiler()
#else
#define PROFILER_INIT() do {} while (0)
#define PROFILE_SCOPE(nameLiteral) do {} while (0)
#define PROFILER_END_FRAME(visualizer) do {} while (0)
#define PROFILER_END() do {} while (0)
#endif // PROFILE
#endif // PROFILER_MACROS_DEFINEDProfiler's node tree class.
namespace Profiler
{
static const size_t InvalidNodeIdx = std::numeric_limits<size_t>::max();
...
class ScopeProfileTree
{
public:
class iterator
{
public:
iterator(ScopeProfileNode* pNode, ScopeProfileTree* pTree, int depth) :
m_pNode(pNode),
m_pTree(pTree),
m_depth(depth) {}
iterator& operator++()
{
advance();
return *this;
}
iterator operator++(int)
{
iterator treeIterator = *this;
advance();
return treeIterator;
}
bool operator==(iterator other) const
{
return this->m_pNode == other.m_pNode;
}
bool operator!=(iterator other) const
{
return this->m_pNode != other.m_pNode;
}
ScopeProfileNode& operator*() const
{
return *m_pNode;
}
ScopeProfileNode* operator->() const
{
return m_pNode;
}
int depth() const
{
return m_depth;
}
private:
ScopeProfileNode* m_pNode;
ScopeProfileTree* m_pTree;
int m_depth;
void advance()
{
if (!m_pNode) return;
if (m_pNode->firstChildIdx != InvalidNodeIdx)
{
m_pNode = m_pTree->getNodePtr(m_pNode->firstChildIdx);
m_depth++;
return;
}
while (true)
{
if (m_pNode->nextSiblingIdx != InvalidNodeIdx)
{
m_pNode = m_pTree->getNodePtr(m_pNode->nextSiblingIdx);
return;
}
if (m_pNode->parentIdx == InvalidNodeIdx)
{
m_pNode = nullptr;
m_depth = -1;
return;
}
m_pNode = m_pTree->getNodePtr(m_pNode->parentIdx);
m_depth--;
}
}
};
ScopeProfileTree() :
m_nodes(0),
m_openNodes(0),
m_stats(0)
{
m_nodes.reserve(m_sMaxNodesCount);
m_openNodes.reserve(m_sMaxNodesCount);
m_stats.reserve(m_sMaxNodesCount);
reset();
}
~ScopeProfileTree() {}
iterator begin()
{
if (m_nodes.size() <= m_sStartIdx)
{
return end(); // skip empty root
}
return iterator{ &m_nodes[getRootIdx()], this, 0 };
}
iterator end()
{
return iterator{ nullptr, this, -1 };
}
void reset()
{
m_nodes.clear();
m_openNodes.clear();
pushNode(InvalidNodeIdx, -1); // root
m_openNodes.emplace_back(0);
}
void onNodeOpen(int id)
{
const size_t parentIdx = m_openNodes.back();
const size_t thisIdx = m_nodes.size();
#ifdef _DEBUG
if (thisIdx == m_sMaxNodesCount)
{
fprintf(stderr, "Increase the default capacity of the profiler's node storage!\n");
}
#endif // DEBUG
pushNode(parentIdx, id);
ScopeProfileNode& parentNode = m_nodes[parentIdx];
if (parentNode.firstChildIdx == InvalidNodeIdx)
{
parentNode.firstChildIdx = thisIdx;
parentNode.lastChildIdx = thisIdx;
}
else
{
m_nodes[parentNode.lastChildIdx].nextSiblingIdx = thisIdx;
parentNode.lastChildIdx = thisIdx;
}
m_openNodes.emplace_back(thisIdx);
}
void onNodeClose(const char* n, double startT, double elapsedT)
{
if (m_openNodes.size() <= 1)
{
return;
}
const size_t lastOpenIdx = m_openNodes.back();
m_nodes[lastOpenIdx].setData(n, startT, elapsedT);
m_openNodes.pop_back();
storeStats(&m_nodes[lastOpenIdx].data, m_nodes[lastOpenIdx].id);
}
const ScopeProfileNode& getNode(size_t idx) const
{
return m_nodes.at(idx);
}
const ScopeStats& getOrCreateStats(int idKey)
{
return m_stats[idKey];
}
bool hasStatsFor(int idKey) const
{
return m_stats.find(idKey) != m_stats.end();
}
size_t getNodesCount() const
{
return m_nodes.size();
}
size_t getRootIdx() const
{
return m_sStartIdx;
}
private:
static const size_t m_sStartIdx = 1;
static const size_t m_sMaxNodesCount = 64;
std::vector<ScopeProfileNode> m_nodes;
std::vector<size_t> m_openNodes;
std::unordered_map<int, ScopeStats> m_stats;
friend class iterator;
void pushNode(size_t parent, int id)
{
m_nodes.emplace_back(id, parent);
}
void storeStats(ScopeProfileData* pData, int id)
{
auto it = m_stats.find(id);
if (it != m_stats.end())
{
ScopeStats& nodeStats = it->second;
nodeStats.maxElapsedTime = std::max(nodeStats.maxElapsedTime, pData->elapsedTime);
nodeStats.minElapsedTime = std::min(nodeStats.minElapsedTime, pData->elapsedTime);
nodeStats.pushElapsedTime(pData->elapsedTime);
}
else
{
m_stats.emplace(id, ScopeStats{ pData->elapsedTime, pData->elapsedTime });
}
}
ScopeProfileNode* getNodePtr(size_t idx)
{
return &m_nodes.at(idx);
}
ScopeProfileNode& getNodeRef(size_t idx)
{
return m_nodes.at(idx);
}
};
...
}Function that assembles the tree text:
void getFrame(FrameProfileData* pFrameData)
{
memset(pFrameData->header, 0, FrameProfileData::headerSize);
memset(pFrameData->body, 0, FrameProfileData::bodySize);
snprintf(pFrameData->header, FrameProfileData::headerSize, "Frame %08llu | Duration - real (ms)
| - max (ms) | - min (ms) | - avg in %zu fr (ms) | Scope \n",
static_cast<unsigned long long>(ScopeTimer::sFrameNumber), ScopeStats::movingAverageWindowSize);
for (auto it = profileTree.begin(); it != profileTree.end(); it++)
{
const ScopeProfileNode& node = *it;
const ScopeStats& stats = profileTree.getOrCreateStats(node.id);
formatProfileRowIndented(pFrameData->body, FrameProfileData::bodySize, node.data, stats, it.depth());
}
}
Currently, the terrain generation implements simple Fractal Brownian Motion and height-gradient based erosion. Below are some screenshots of different configuration presets.
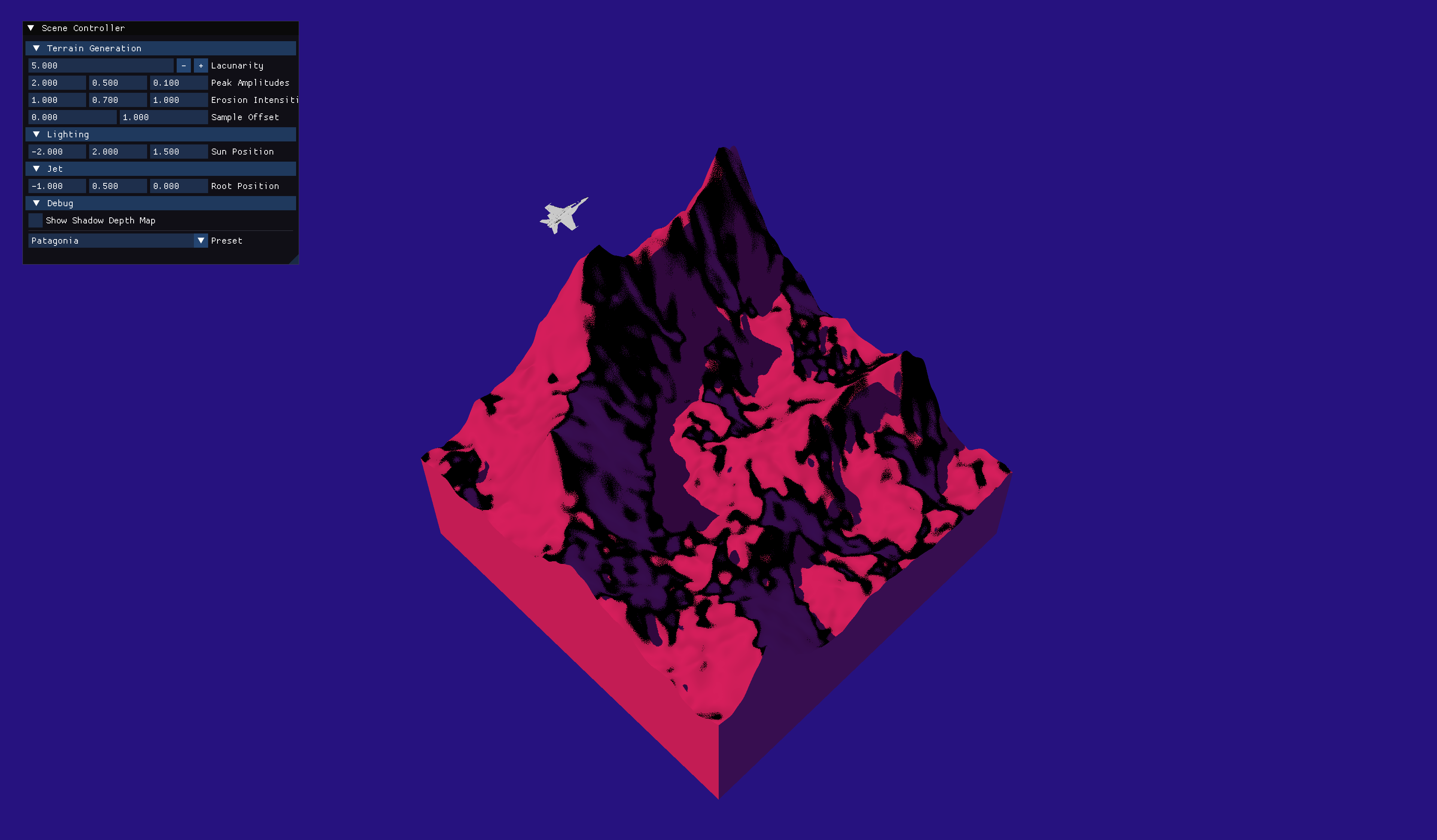
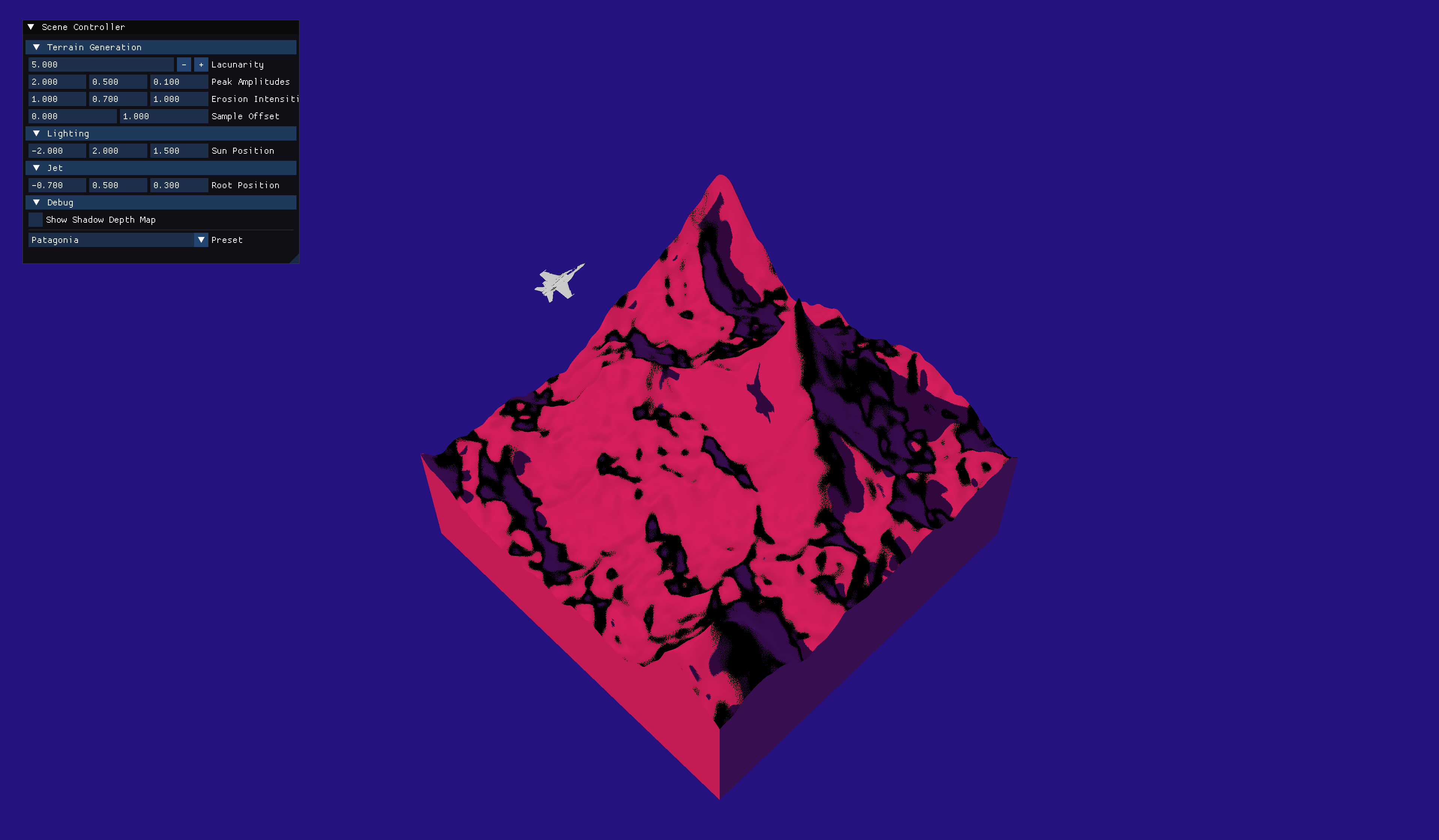 Preset 1
Preset 1
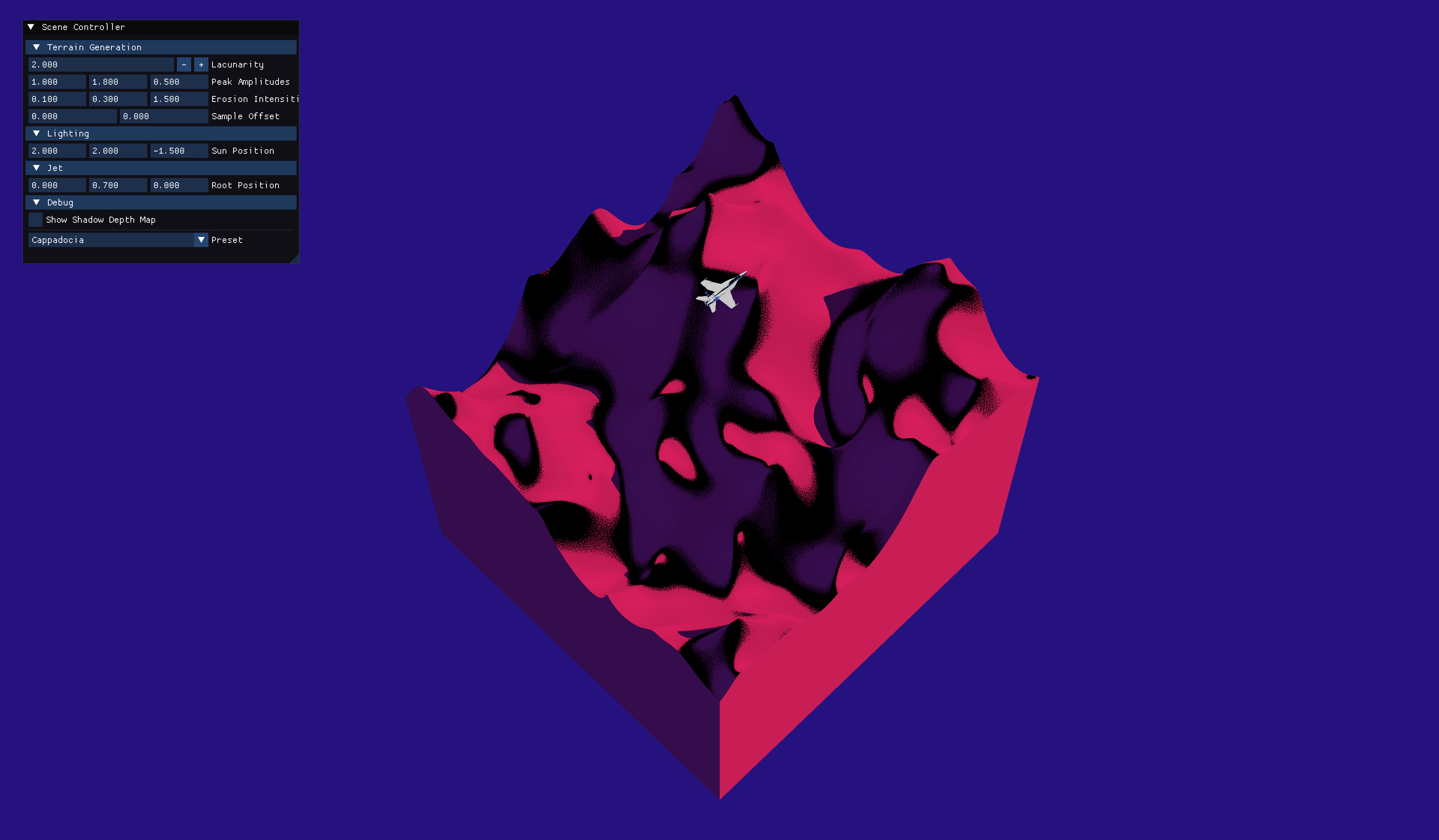
 Preset 2
Preset 2
The jet model is a free Sketchfab asset.